Automatización de carga a Flow Pack
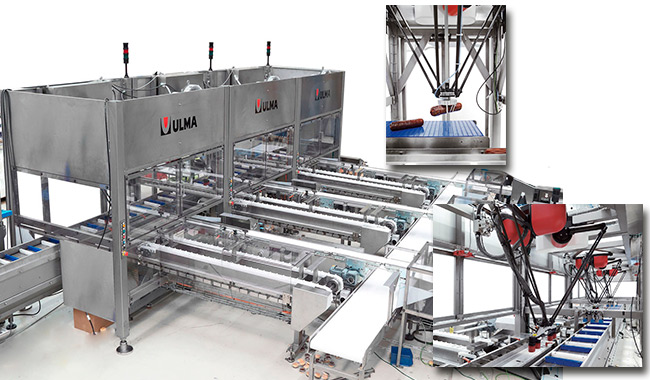
Célula de robots compactos para aplicaciones de carga de producto y especialmente diseñados para su integración con máquinas de empacado. Los robots van equipados con garras especialmente diseñadas para cada aplicación. Las capacidades varían en función de las dimensiones, características y flujo del producto, así como de los requerimientos del sistema. El área de trabajo puede variar en base a la configuración de las células. El control propio de la célula permite centralizar e integrar los distintos elementos del sistema.
FEEDPACKER
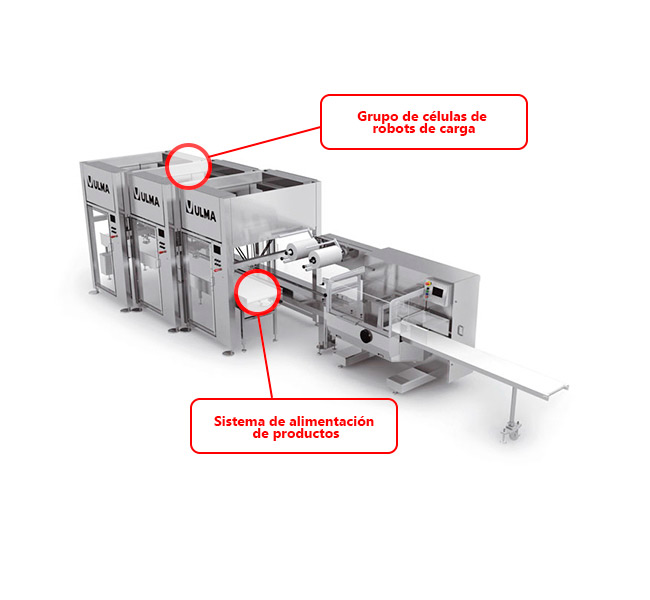
Grupo de células de robots de carga
Compuesto por robots ULMA D12H con sistemas de visión artificial para conocer y localizar los productos que se reciben aleatoriamente distribuidos. La carga y la descarga se realiza en movimiento con función de tracking, tanto de la cinta de transporte como al carro de la máquina.
Sistema de alimentación de productos
Sistema de transporte de productos distribuidos aleatoriamente, cuya velocidad esta controlada desde la célula de carga.
MULTIPACKER
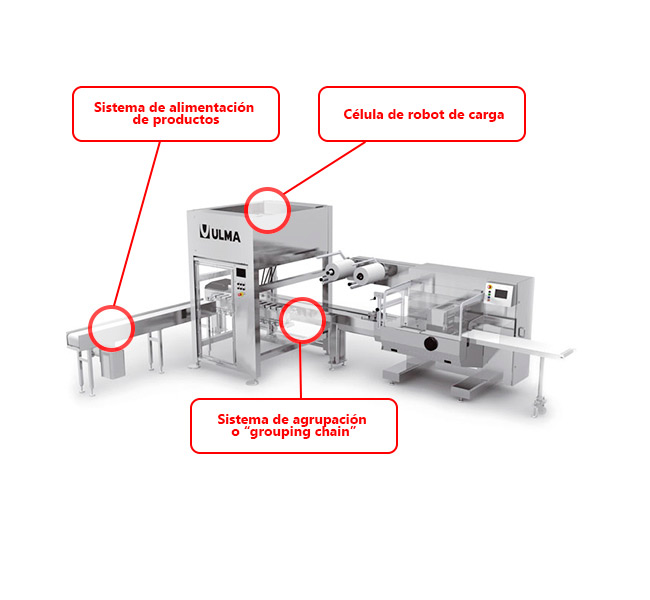
Sistema de alimentación de productos
Sistema de transporte de productos empacados. Dependiendo del sistema de carga, los productos se deben transportar orientados y controlados en todo momento, para poder insertar en el sistema de agrupación de la célula.
Célula de robot de carga
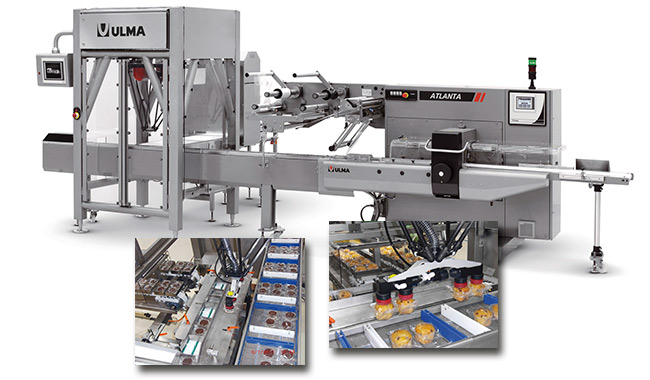
Compuesto por robot ULMA D12H. Puede disponer de sistemas de visión artificial para conocer y localizar los productos o realizar agrupaciones de productos empacados y manipular unitaria o en grupos. La carga se puede realzar en parado o en tracking.
Sistema de agrupación o “grouping chain”
Sistema compuesto por uno o dos motores independientes, donde realiza la agrupación de los productos de forma continua y poder manipular grupos de producto en un solo ciclo del robot. Los productos se deben de transportar completamente orientados en su transporte previo, pudiendo realizar la agrupación a 90º o en línea a gran velocidad.
La carga y la descarga se pueden realizar en movimiento dependiendo de la velocidad de la aplicación.
 Previous:
Robots ULMA
Previous:
Robots ULMA

